

Актуальные вопросы метрологии весового контроля грузового автотранспорта
Сенянский М.В.
Кандидат технических наук,
Генеральный директор
ЗАО «Весоизмерительная компания «Тензо-М»
АКТУАЛЬНЫЕ ВОПРОСЫ МЕТРОЛОГИИ ВЕСОВОГО КОНТРОЛЯ ГРУЗОВОГО АВТОТРАНСПОРТА
В целях обеспечения сохранности автомобильных дорог федерального значения с 1 октября 2016 г., согласно решению Федерального дорожного агентства «РОСАВТОДОР», в пилотном режиме стартовал процесс автоматического взимания штрафов с большегрузных транспортных средств (АТС) за превышение допустимых весовых и габаритных параметров на федеральных дорогах одного из регионов страны. С учетом накопленного опыта взимание штрафов на базе данных измерений автоматическими комплексами весогабаритных измерений планируется внедрить и на других федеральных дорогах.
В ближайшие годы автоматические комплексы будут установлены и на региональных дорогах. Как известно, размер штрафов и сумм компенсации ущерба велик и, согласно Постановлению Правительства № 12 от 9 января 2015 г., может достигать полумиллиона рублей. Это должно убедить грузоотправителей загружать свои автомобили без превышения допустимых норм по полной массе и осевым нагрузкам.
В настоящее время во всех регионах страны весовой контроль производится на стационарных и передвижных постах посредством портативных или стационарных весов поосного взвешивания инспекторами УГАДН или службами весового контроля региональных дорожных организаций. Во многих регионах эти службы используют весы, разработанные и произведенные нашим предприятием – ЗАО «Весоизмерительная компания «ТЕНЗО-М». Портативные автомобильные весы ВА-20П и стационарные весы поосного взвешивания ВА-Д-20 включены в Государственный реестр средств измерений, соответствуют ГОСТ OIML R76-1-2015 и ГОСТ 33242-2015 и положительно зарекомендовали себя у инспекторов в течение многих лет.
Из государственных структур к нам регулярно поступают запросы, касающиеся правильности проведения процедур взвешивания. Их тематика показывает, что в ряде случаев пользователи не полностью выполняют требования руководств по эксплуатации весов и методик выполнения измерений. В результате погрешности результата измерений и средства измерений могут существенно отличаться. С учетом серьезных финансовых последствий трактовки результатов взвешивания АТС в процессе весового контроля, разъяснение этого важного отличия применительно к процессу весового контроля АТС и является предметом настоящей статьи.
На практике процесс весового контроля АТС включает в себя поочередную фиксацию величин осевых нагрузок посредством стационарных или портативных весов статического взвешивания или взвешивания в движении. Результатом данного процесса, являющегося процессом прямых измерений, является получение ряда значений осевых нагрузок данного АТС. Такой метод взвешивания в работе [1] назван методом последовательного поосного взвешивания.
Метод одновременного поосного взвешивания требует существенно больших материальных и временных затрат, поскольку число пар весовых платформ должно быть равно числу осей и нужно регулярно переставлять их на площадке согласно меняющимся межосевым расстояниям каждого нового АТС [1]. Преимуществом этого метода является то, что не только осевые нагрузки, но и полная масса будут результатом прямых измерений.
Значение полной массы автомобиля при использовании метода последовательного поосного взвешивания находится путем суммирования величин осевых нагрузок, т. е. путем косвенных измерений, требующих наличия зарегистрированной в Государственном информационном фонде методики выполнения измерений.
Результат весовых измерений параметров зависит прежде всего от АТС и его параметров: полной массы и ее распределения между осями, его технического состояния, используемого средства измерений – весов поосного взвешивания, правильности действий персонала, участвующего в процессе, качества подъездных путей и встроенного программного обеспечения:
РЕЗУЛЬТАТ ИЗМЕРЕНИЙ {Оi} = f(АТС, СИ, П, ПП, ПО), (1)
где Оi – величина нагрузки на i-ю ось АТС; АТС – объект измерений (техническое состояние автомобиля, колесная формула, тип подвески, характер груза и т. д.); СИ – метрологические характеристики средства измерений (весов поосного взвешивания); П – персонал, участвующий в процессе измерений; ПП – качество подъездных путей (ровность, горизонтальность и т. д.); ПО – встроенное, сертифицированное в процессе испытаний с целью утверждения типа СИ программное обеспечение весов.
Ранее уже отмечалось, что осевые нагрузки осей, работающих в составе многоосных (2 и более осей) тележек грузовых автомобилей, в процессе движения автомобилей непрерывно меняются [1]. Обусловлено это изменением сил и моментов в элементах подвесок в результате неустановившегося движения ТС по дороге с неровным покрытием и различными управляющими воздействиями водителя, такими как нажатие на педали тормоза и «газа», использование стояночного («ручного») тормоза, рулевого управления и селектора коробки передач. Наибольшее влияние на осевые нагрузки оказывает управление пневмоподвеской.
В результате влияния перечисленных факторов величины осевых нагрузок могут изменяться в довольно широких пределах – до ± 10 %. Задачей инспектора весового контроля является обеспечение таких условий измерения осевых нагрузок и полной массы АТС, при которых их величины максимально приближены к воздействующим на дорожное полотно в процессе установившегося равномерного движения автомобиля по дороге.
До недавнего времени в мире не существовало традиционных полноразмерных весов статического взвешивания, которые наряду с традиционным измерением полной массы АТС – взвешиванием при условии одновременного размещения всех осей на грузоприемной платформе – могли бы измерять еще и величины осевых нагрузок. Поэтому на протяжении почти полувека для измерения осевых нагрузок использовались весы поосного взвешивания. Эти весы, как правило, имеют схожие характеристики. Например, в режиме статического взвешивания цена поверочного деления, или дискретность, е = d = 10…100 кг, а в режиме взвешивания в движении погрешность измерения осевых нагрузок находится в пределах от 1 до 10 %.
Следует учитывать, что с утверждением Приказом министра транспорта России технического регламента Федеральной службы «Ространснадзор» о проведении весового контроля АТС контрольное взвешивание необходимо выполнять только методом статического взвешивания. В этом режиме погрешность используемых на практике весов, как правило, очень мала и не превышает ± (10…20) кг, что с запасом удовлетворяет требованиям Приказа другого федерального министра – МВД – от 20.01.15 г. за № 32. Иными словами, инструментальная погрешность весов (погрешность средства измерений) на 1…2 порядка меньше, чем вариации осевых нагрузок объекта измерений.
Персонал в процессе измерений участвует «по обе стороны баррикады» (рис. 1). Руководящий процессом инспектор подает команды водителю и следит за тем, чтобы колеса взвешиваемой оси во время взвешивания находились в середине грузоприемной платформы и были соблюдены требования руководства по эксплуатации весов. Водитель выполняет команды инспектора и передвигает пошагово автомобиль, обеспечивая фиксацию результатов измерений по каждой оси.
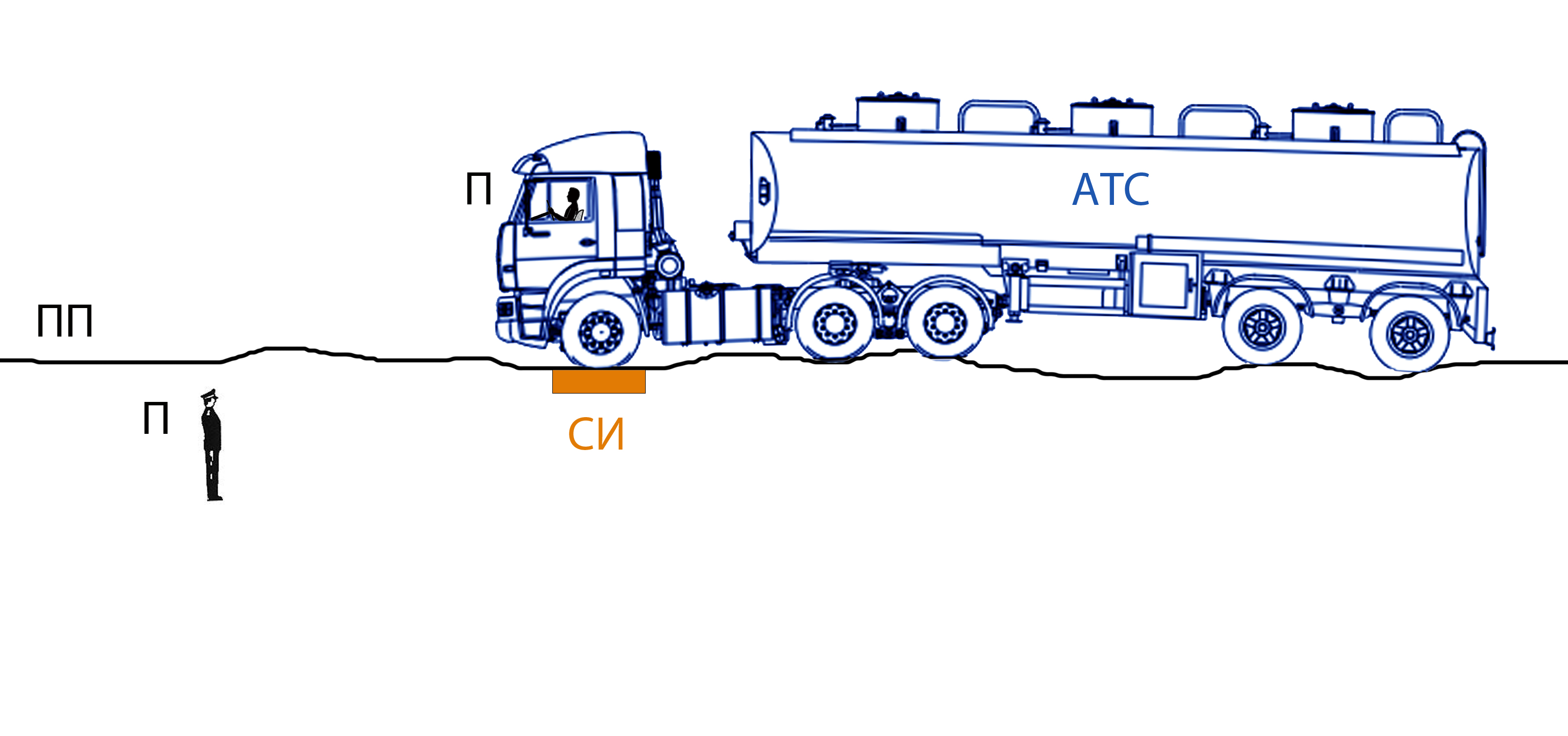
Рис. 1. Процесс весового контроля АТС методом последовательного поосного взвешивания
Задача инспектора состоит в получении достоверных результатов измерения осевых нагрузок АТС, которыми оно воздействует на дорожное полотно, и в случае, когда допустимые нормы превышены, оформлении протокола об административном правонарушении правил перевозки грузов автомобильным транспортом.
Ряд водителей занимает активную позицию, пытаясь, со своей стороны, повлиять известными им способами на величины измеряемых осевых нагрузок. Самым кардинальным из них является манипулирование пневмоподвеской. В ряде современных автомобилей можно уменьшать нагрузку, приходящуюся на взвешиваемую в данный момент ось. Иногда процесс изменения нагрузки можно наблюдать по показаниям весов. В данном случае мы имеем дело не с погрешностью измерения весов, а с нестабильностью измеряемой величины осевой нагрузки, явившейся следствием действий персонала – водителя АТС.
Конечно, такую погрешность результата можно исключить. Такую погрешность в метрологии обычно называют исключаемой систематической, в отличие от случайной погрешности, исключению не подлежащей, поскольку обусловлена она случайными факторами. При взвешивании АТС с инициативным и изобретательным водителем метрология сталкивается с новым видом погрешности, которую следовало бы назвать исключаемой случайной. Инспектор может исключить ее для того, чтобы узнать: с какой же действительной нагрузкой ось воздействует на дорожное полотно при работе подвески в штатном режиме. Для этого он лишь должен потребовать от водителя перевести пневмоподвеску в режим «автомат» и контролировать это на протяжении всего интервала времени, пока производится поосное взвешивание.
Существенное влияние на результат измерения оказывают геометрические параметры подъездных путей. Независимо от режима поосного взвешивания – в движении или статического – ровность и горизонтальность путей оказывают существенное влияние на точность взвешивания (рис. 2, 3). Как было отмечено ранее, погрешность самих весов, например, ВА-20П, составляет пренебрежимо малую величину ± 10 / 20 кг по сравнению с наблюдаемыми, вследствие действий водителя, вариациями осевых нагрузок. Аналогично и влияние, например, негоризонтальности и неплоскостности подъездных путей. Если весы расположены «в яме», то из-за перемещения центра тяжести груза величины измеряемых последовательно осевых нагрузок вырастут, а вслед за ними увеличится и полная масса АТС, определяемая как их сумма.
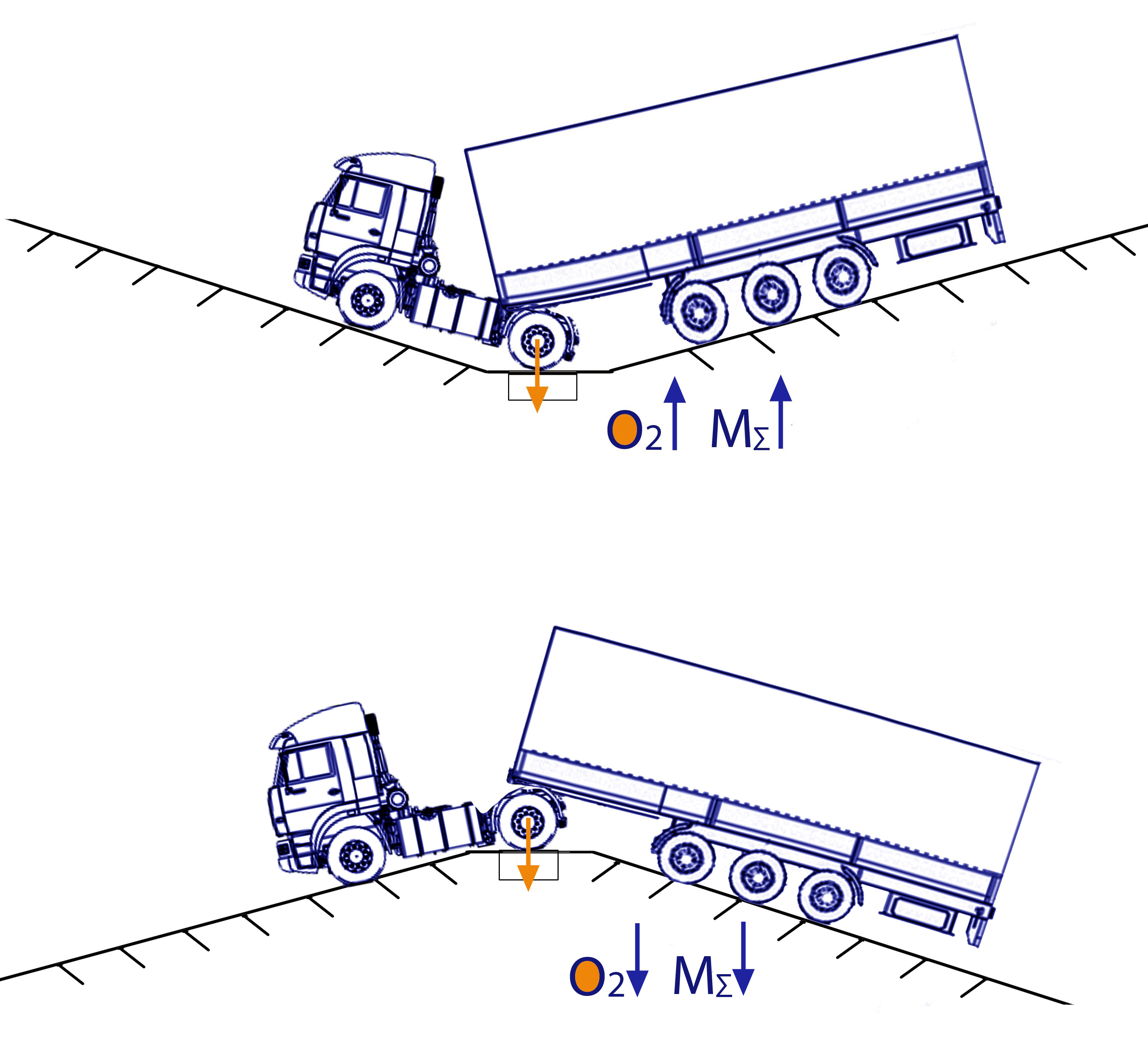
Рис. 2. Возникновение систематических погрешностей измерения осевых нагрузок и полной массы АТС вследствие нарушения геометрических параметров подъездных путей

Рис. 3. Типичное несоответствие профиля подъездных путей требованиям руководства по эксплуатации весов и ГОСТ 33242-2015
Обратная ситуация складывается при такой ошибке строителей фундамента и подъездных путей, когда весы оказываются выше подъездных путей. Требования, предъявляемые к неровности и горизонтальности путей государственным стандартом ГОСТ 33242-2015, очень жесткие: на расстоянии до 8 м от весов неплоскостность дорожного покрытия не должна превышать ± 3 мм, а на расстоянии от 8 до 16 м – соответственно ± 6 мм! Весь измерительный участок до и после весов общей длиной 32 м должен удовлетворять этим требованиям. Сама плоскость может иметь постоянный допустимый уклон, величина которого оговорена в руководстве по эксплуатации весов. Его превышать нельзя.
Ввиду малых допусков на неплоскостность в реальной практике часто эти требования не выполняются и погрешность результата измерений превышает погрешность самих весов. Для облегчения содержания подъездных путей в нормативном состоянии разработан ряд конструктивных приемов для дорожников, применяющих весы поосного взвешивания. Один из них показан на рис. 4. Здесь для защиты путей от колейности и неплоскостности в поверхность цементобетонного покрытия забетонированы продольные лонжероны длиной более 12 м, выполненные из швеллера размером не менее 160 мм. Указанная конструкция прослужила без ремонта уже более 10 лет. И это при очень высокой интенсивности движения грузового автотранспорта в климатических условиях с большим числом пересечения нулевой температуры в зимнее время и межсезонье!

Рис. 4. Усиление подъездных путей продольными металлическими лонжеронами
«Азбуку» весового контроля АТС можно концентрированно сформулировать следующим образом.
1. При выполнении измерений осевых нагрузок в ходе проведения мероприятий по контролю движения тяжеловесных транспортных средств для получения легитимных результатов взвешивания необходимо соблюдать требования руководства по эксплуатации весов и методик выполнения измерений.
2. В процессе весового контроля параметры АТС (осевые нагрузки и полная масса) должны максимально соответствовать его параметрам в состоянии установившегося штатного движения по дороге. С этой целью водитель и инспектор должны обеспечить штатные режимы работы подвески и систем АТС, а также используемых средств измерений.
3. Грузоприемные платформы весов должны быть установлены на площадке с подъездными путями, полностью соответствующими требованиям, перечисленным в паспорте и руководстве по эксплуатации. Не должно быть так называемого эффекта табуретки. Неплоскостность и уклон подъездных путей должны находиться в допустимых пределах. При использовании портативных автомобильных весов на проезжей части дорожного покрытия необходимо обеспечить расположение всех колес многоосной тележки (группы сближенных осей) в одной плоскости с поверхностью грузоприемной платформы. Для этого необходимо использовать необходимое количество проставок постоянной высоты.
4. Водитель в процессе взвешивания осей не должен пользоваться ножным и стояночным тормозами, рычагом переключения передач. Руль обязан находиться в нейтральном положении, а пневмоподвеска в равновесном состоянии – режиме «автомат». При необходимости фиксации АТС от скатывания следует пользоваться штатным «башмаком», подкладываемым под колеса оси, наиболее удаленной от весов.
5. Используемые весы должны иметь действующие свидетельство об утверждении типа и свидетельство о поверке. Весы должны находиться в исправном состоянии.
6. Исключение влияния персонала – «человеческого фактора» – полностью может быть достигнуто лишь путем внедрения полностью автоматического процесса весового контроля, делающего практически невозможным преднамеренное воздействие на результаты измерений с обеих сторон.
Список литературы:
1. Сенянский М.В. Методологические вопросы поосного взвешивания автомобилей // Законодательная и прикладная метрология. 2013. № 1.
2. Сенянский М.В. Весовой контроль АТС – коротко о важном // Спецвыпуск «Передовые технологии» журнала «Дорожная держава». 2014.